During the Architectural Association School in London they are working on the Graduate Design program on design studies on "Behavioural Complexity", especially 3D printed and pneumatic robots that serve a single, very specific purpose or function according to a single "simple" algorithm. For example, Synergia is a concept for programmable matter with pneumatic robot cube swarms, OwO are something like robot maggots for public space.

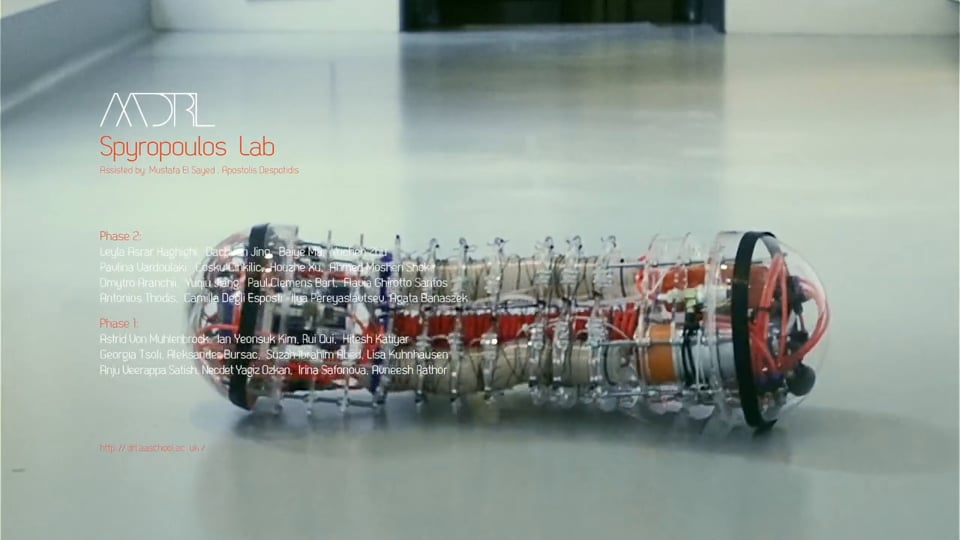
AADRL Spyropoulos Design Lab 2016 (Phase 2)
Creative Applications has an overview of the Final theses 2016. The info texts can be half ignored, there is always a lot of pretentious design bells and whistles from turtleneck sweaters, but the work itself could actually be done for NASA and its pneumatic modules like that Bigelow Space Habitat to be interesting.
The following is the work from AADRL Spyropoulos Design Lab, which has been exploring behavior based design systems that are self-aware, mobile, and self-structure and assemble. The research explores high population mobility agents that evolve design that moves beyond finite conceptions of space towards one that co-evolves and adapts. The research looks at developing strategies of intelligent design units that through organization develop body plans that afford new behaviors to emerge. An example of this is OWO project below which as a singular unit is conceptualized as a unit that through embedded pneumatics allows the unit to expand / contract, curl, and roll. With respect to mobility as an individual unit it can roll in its mobility mode, but for example a unit connects to two other units then the body plan allows for a tripod configuration, which allows the creature to walk.
AADRL Spyropoulos Design Lab
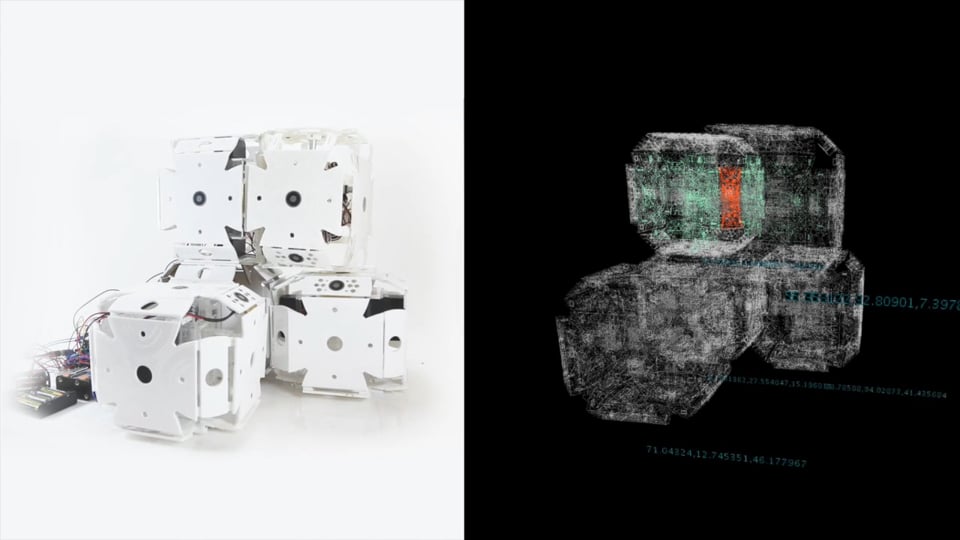
AADRL Spyropoulos_HyperCell
More for you:






 "Dravens Tales from the Crypt" has been enchanting for over 15 years with a tasteless mixture of humor, serious journalism - for current events and unbalanced reporting in the press politics - and zombies, garnished with lots of art, entertainment and punk rock. Draven has turned his hobby into a popular brand that cannot be classified.
"Dravens Tales from the Crypt" has been enchanting for over 15 years with a tasteless mixture of humor, serious journalism - for current events and unbalanced reporting in the press politics - and zombies, garnished with lots of art, entertainment and punk rock. Draven has turned his hobby into a popular brand that cannot be classified.
My blog was never designed to spread news, let alone get political, but with current affairs I just can't help but capture information here that is otherwise censored on all other channels. I am aware that the design page may not seem "serious" to many in this regard, but I will not change this to please the "mainstream". Anyone who is open to non-state-compliant information sees the content and not the packaging. I've tried enough to provide people with information over the last 2 years, but quickly noticed that it never matters how it's "packaged", but what the other person's attitude towards it is. I don't want to put honey on anyone's mouth to meet expectations in any way, so I'll keep this design because hopefully at some point I'll be able to stop making these political statements, because it's not my goal to go on like this forever ![]() I leave it up to everyone how they deal with it. However, you are welcome to simply copy and distribute the content, my blog has always been under the WTFPL license.
I leave it up to everyone how they deal with it. However, you are welcome to simply copy and distribute the content, my blog has always been under the WTFPL license.
It's hard for me to describe what I'm actually doing here, DravensTales has become a culture blog, music blog, shock blog, tech blog, horror blog, fun blog, a blog about found items on the internet, internet bizarre, trash blog, art blog, water heater, zeitgeist blog over the years , Scrap blog and grab bag blog called. Everything that is right ... - and yet not. The main focus of the blog is contemporary art, in the broadest sense of the word.
To ensure the operation of the site, you are welcome to Make a donation by credit card, Paypal, Google Pay, Apple Pay or direct debit/bank account. Many thanks to all readers and supporters of this blog!